Land Rover
This project focuses on the design and assembly of an autonomous land vehicle for entry into the RoboMagellan contest hosted at RoboGames. The project is split into three sections: Mechanical Design, Electronics, and Programming.
Mechanical Design:
Over the course of the project, we have experimented with several designs.
The first design was a simple four wheel drive chassis made from machined aluminum. A plate was attached to the top and two belt driven motors provided the forward motion.
Mechanical Design:
Over the course of the project, we have experimented with several designs.
The first design was a simple four wheel drive chassis made from machined aluminum. A plate was attached to the top and two belt driven motors provided the forward motion.

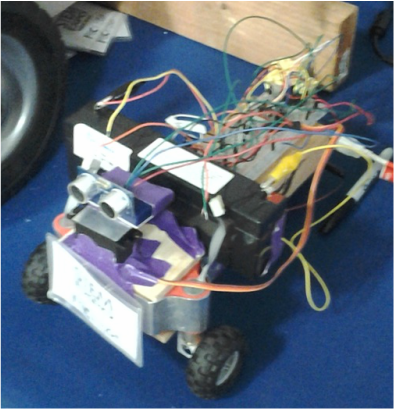
The second design functioned as a miniature prototype for testing of electronics and programming. The design was simply a block of wood with two motors and a castor for forward motion.
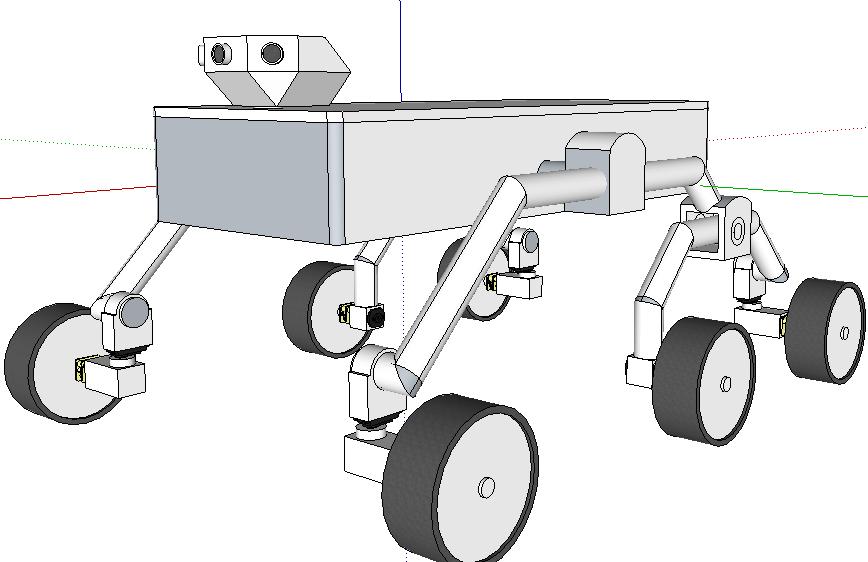
The current design is based on the rocker bogie system used on all of NASA's rovers. It uses six motor driven wheels for forward motion and four additional motors for steering. Since the pressure is evenly distributed across each of the six wheels, the rover is capable of smoother travel.